(Department seminar no. 65)
Time: October 12th, 2017, 11:15
Place: room 208 C-3
Speaker: Krzysztof Tchoń
Subject: Dynamics normal forms of a space manipulator
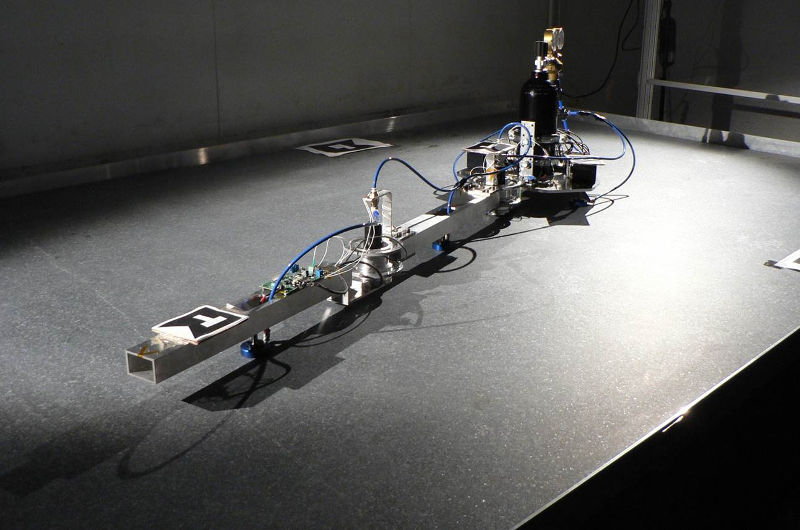
The presentation is devoted to the dynamics of the free floating space manipulator designed in the Space Research Center of the Polish Academy of Sciences, displayed in the figure below. A Lagrangian model of the dynamics is studied, in the form of a control affine system. Two kinds of the system equivalence are employed: the feedback equivalence and the orbital feedback equivalence. Using these equivalences two classes of normal form have been discovered. An application of these normal forms to motion planning of the manipulator is demonstrated.